导轨相位投影开发说明
| 修订日期 | 修订版本 | 修订内容 | 修订人 |
|---|---|---|---|
| 2025.04.21 | v0.1 | 初始化文档 | 李东阳 |
1. 相位同步投影方案
下面以单自由度导轨说明
根据需求,用户指定起点和终点,包括协同路径的起点和终点,以及导轨的起点和终点。所以需要进行“相位同步”投影。将当前点距离协同路径的起点的弧长传入,然后通过弧长映射到导轨运动区间(用户指定的起点和终点)如图:
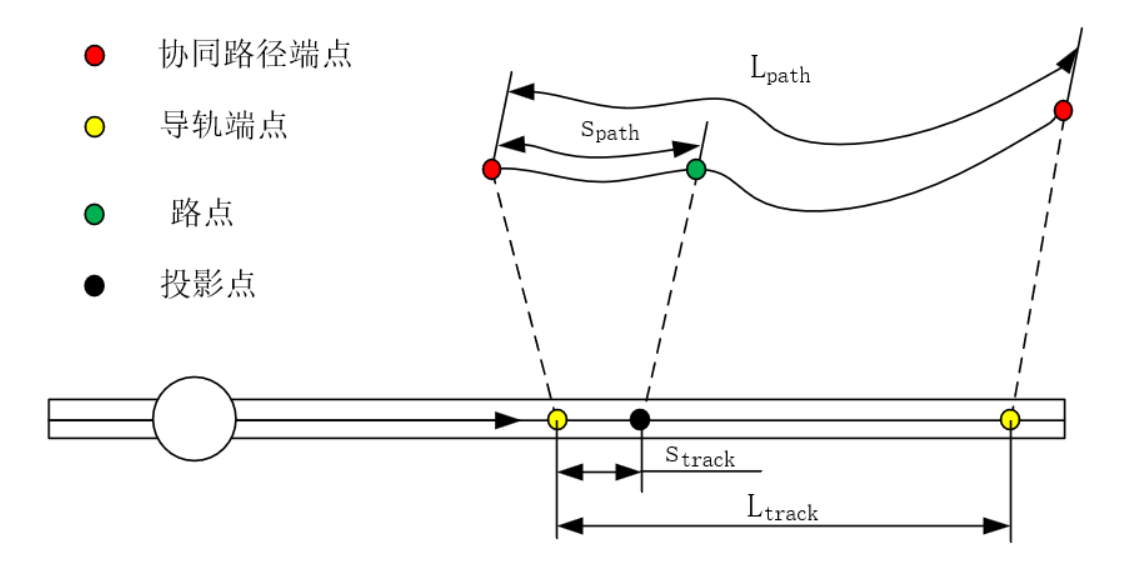
映射关系:
不改变现有接口,将TrackIKConfigInfo中添加两个成员变量,用户只需要设置track_range
struct TrackIKConfigInfo
{
int type{0}; // 逆解策略类型(0: 垂直投影, 1: 相位投影)
//! 垂直投影设置
Array3d offset_params{}; // 导轨求逆解时, 设置的偏移参数(给导轨末端添加一个box, 这里设置box的长宽高,对应{x, y, z});
Array3d track_ref{}; // 导轨的参考位置
//! 相位投影设置
std::array<Array3d, 2> track_range{}; // 导轨运动区间
double phase_scale; // 相位投影比例参数
};
参数track_range,由用户指定,作为导轨运动区间,phase_scale由plan在规划阶段计算写入。
2. 导轨速度以及加速度限制
重载了现有接口tpAddPositionLine,通过urdf文件获取导轨的速度以及加速度限制, 规划内部以导轨速度以及加速度限制为基准,规划协同路径
3. 开发示例
//! step1: 实例robot
type.second = aubo_i10;
Setup(getRobotType(type.second));
//! step2: 标定工件坐标系{wp}相对于导轨基座标系{track}的位置
interface::RLPose F_B_track, F_B_wp, F_track_wp; // 通过机器人标定,获取F_B_track,F_B_wp
F_track_wp = getWPFrameInTrack(robot, F_B_wp, F_B_track); // 本实例假设工件坐标系和导轨坐标系完全重合
// 设置导轨
std::string temp_URDF_PATH = "test/data/tp/external_axle_coordinate/"; // 导轨urdf文件
robot->rlInitiateTrackMotionFromFiles("aubo_track_dof_01", temp_URDF_PATH.c_str(), F_track_wp);
int track_dof = 1;
// 构建路点数据
interface::RLJntArray q0; // 机械臂的初始位置
interface::RLJntArray maxJV = {10, 10, 10, 10, 10, 10};
interface::RLJntArray maxJA = {30, 30, 30, 30, 30, 30};
std::array<double, 2> maxCV = {10, 10};
std::array<double, 2> maxCA = {80, 80};
std::vector<interface::PathProperty> path_propertys;
std::vector<interface::MoveProperty> move_propertys;
std::vector<interface::PathPoint> pathpoint;
std::vector<interface::RLPose> poses;
std::vector<interface::TrackIKConfigInfo> track_configs;
q0 = {33.34 * M_PI / 180, -16.69 * M_PI / 180, 98.32 * M_PI / 180, 24.94 * M_PI / 180, 90.25 * M_PI / 180, 33.34 * M_PI / 180};
poses = { {0.6316567628115636,0.5334872319012133,0.5824663189182125,-3.134912569201568,0.004272085690594685,1.569044343608399},
{0.6316567577716762,0.8401660046995325,0.5824663239968462,-3.134912877766409,0.004272106335617448,1.569044268191154} };
interface::TrackIKConfigInfo track_config;
track_config.type = 1;
track_config.track_range = { { {0.18, 0, 0}, {0.6, 0, 0} } }; // 设置导轨运动范围
track_configs.push_back(track_config);
track_config.track_range = { { {0.6, 0, 0}, {0.7, 0, 0} } }; // 设置导轨运动范围
track_configs.push_back(track_config);
int N = poses.size();
path_propertys.resize(N);
move_propertys.resize(N);
pathpoint.resize(N);
interface::Array2d blend_radius = {-0.1, -0.1}; // 不支持交融,设置为负数
std::vector<double> maxCV_main = {0.4, 0.4}; // 协同路径的速度
std::vector<double> maxCA_main = {2, 20};
std::vector<double> maxCJ_main = {16, 160};
for(int i = 0; i < N; i++)
{
path_propertys[i].plan_method = interface::PlanMethod::ONLY_POSITION_PLAN;
path_propertys[i].describe_space = interface::DescribeSpace::CARTESIAN;
path_propertys[i].cur_prop.type = interface::CurveType::LINE;
path_propertys[i].blend_radius = blend_radius;
path_propertys[i].track_ik_config = track_configs[i];
move_propertys[i].maxV = maxCV_main;
move_propertys[i].maxA = maxCA_main;
move_propertys[i].maxJ = maxCJ_main;
move_propertys[i].dynamic_adjust_motion_constraints = false;
move_propertys[i].sync_move = true;
pathpoint[i] = generatePathPoint(interface::DescribeSpace::CARTESIAN, i+1, {}, poses[i]);
}
// 添加路点
initiatePlanner(robot, q0, t_w);
robot->tpSetVelocityAndAccelerationLimits(maxJV, maxJA, maxCV, maxCA, 0);
robot->tpSetPlannerCapacity(interface::PlannerCapacity::LookAhead, 1);
robot->tpSetPlannerCapacity(interface::PlannerCapacity::ExecutionTrajectory, 10000);
int ret = 0;
for(int i = 0; i < N; i++)
{
ret = robot->tpAddPositionLine(pathpoint[i], path_propertys[i], move_propertys[i]);
CHECK(ret >= 0);
}
robot->tpSetEndPath();
// 采样取点
std::vector<interface::TrajectoryPoint> traj_points;
int plan_ret = interface::E_PLN_OK;
double cycle = 0.005;
interface::TrajectoryPoint point;
while ((plan_ret = robot->tpUpdateCycle(cycle, point)) != interface::E_PLN_EXEC_EMPTY)
{
if(plan_ret < interface::E_PLN_OK)
return;
traj_points.push_back(point);
}
// 由采样点求导轨逆解
std::vector<std::vector<double>> track_joints;
for(auto& point : traj_points)
{
std::vector<double> track_out;
ret = robot->kdCalTrackInverseKinematics(point.point.pose, point.track_ik_config, track_out);
CHECK(ret >= 0);
track_joints.push_back(track_out);
}
// 求机器人逆解
int sample_point_num = track_joints.size();
std::vector<std::vector<double>> track_pos(track_dof, std::vector<double>(sample_point_num));
for(int i = 0; i < track_dof; i++)
{
for(int j = 0; j < sample_point_num; j++)
{
track_pos[i][j] = track_joints[j][i];
LOGI(log_) << "导轨位置: " << track_joints[j] << ENDL(log_);
}
}
calRobotTraj(robot, F_track_wp, track_pos, q0, traj_points);
plotCurve(track_pos, traj_points, traj_points);
//======================================= 示例封装的相关函数 =================================================
inline interface::PathPoint generatePathPoint(const interface::DescribeSpace& space, const double& id, const std::vector<double>& data)
{
interface::PathPoint point;
point.type = space;
if(space == interface::DescribeSpace::JOINT)
memcpy(point.joint.data(), data.data(), sizeof (double) * point.joint.size());
else
memcpy(point.pose.data(), data.data(), sizeof (double) * point.pose.size());
point.id = id;
return point;
}
int calRobotTraj(const interface::ARALIntfacePtr& robot, const interface::RLPose& F_track_wp, const std::vector<std::vector<double>>& track_position, const interface::RLJntArray& q_ref, std::vector<interface::TrajectoryPoint>& colla_traj)
{
log_->setLogLevel(3);
int ret = 0;
interface::IKConfigInfo config;
config.sol_tolerance = {1e-12, 1e-12};
config.timeout = 200000;
config.q_ref = q_ref; // 初始参考关节角
int track_dof = track_position.size();
int sample_point_num = colla_traj.size();
std::vector<interface::TrajectoryPoint> robot_traj(sample_point_num); // 存储离线轨迹点
std::vector<double> tmp_track_out(track_dof);
for(int i = 0; i < sample_point_num; i++)
{
for(int j = 0; j < track_dof; j++)
tmp_track_out[j] = track_position[j][i];
interface::RLPose F_track_Base;
ret = robot->kdCalTrackForwardKinematics(tmp_track_out, F_track_Base);
colla_traj[i].point.t_w.workpiece = robot->kdChangeReferenceFrame(F_track_wp, robot->kdInverseFrame(F_track_Base));
interface::RLPose point_in_base;
point_in_base = robot->kdChangeReferenceFrame(colla_traj[i].point.pose, colla_traj[i].point.t_w.workpiece);
config.goal = point_in_base;
ret = robot->kdCalInversePosition(config, colla_traj[i].point.t_w.tool, true, colla_traj[i].point.joint);
if(ret < 0)
{
LOGE(log_) << "robot->kdCalInversePosition, 出错!" << ENDL(log_);
return ret;
}
config.q_ref = colla_traj[i].point.joint;
}
return ret;
}